This season, we decided to branch out and build an autonomous
underwater vehicle (AUV). We believe this will give our team new
challenges, since maneuvering and communications for underwater
vehicles is quite different than for surface vehicles like we've
worked on before. We have designed our submarine to be modular so
that it can be adapted to complete a variety of manipulation or
sampling tasks.
The preliminary design is done. Our electronics block
diagram will be reviewed by mentors from Kongsberg and Arc
Boat soon! We have also asked Dr. Andrew Bennett, Dr. John
Leonard, and Alex Soo to review our AUV mechanical design
since they all have extensive experience in AUVs.
Parts have also been ordered, but because the RoboBoat
competition has been moved from June to March, the AUV team
is switching over to Ship Happens to help with their
mechanical tasks since we are prioritizing our RoboBoat
timeline for now.
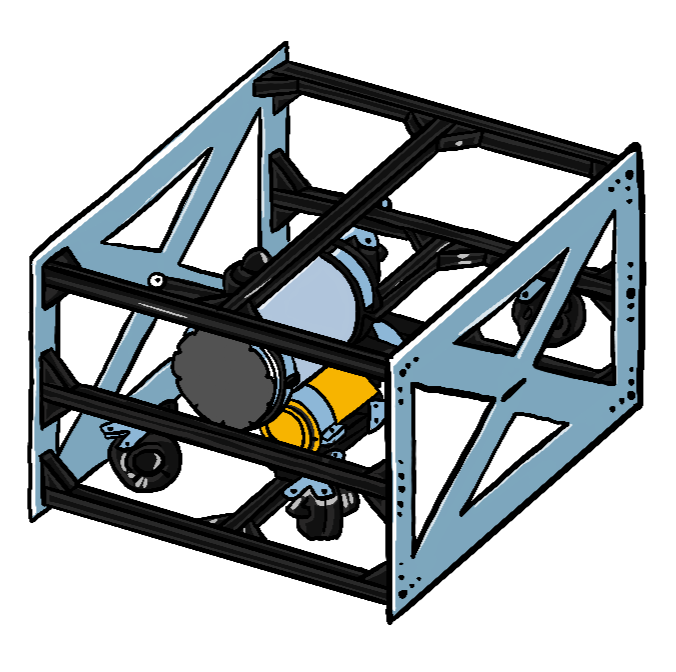
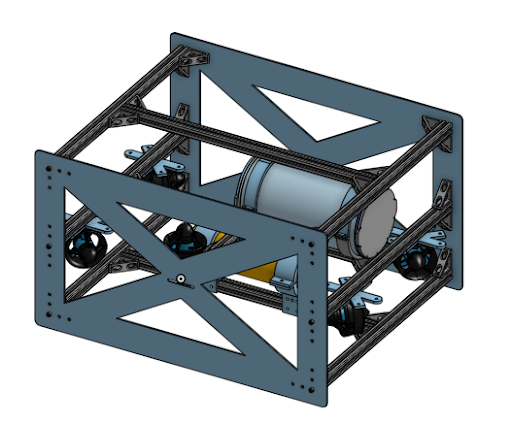
The team has started to use OnShape as our primary CAD
software. It will allow us to quickly share and view each
other’s CAD files. We have already created a preliminary
plan for the AUV in OnShape, including body design and
thruster layout.