September Updates
General
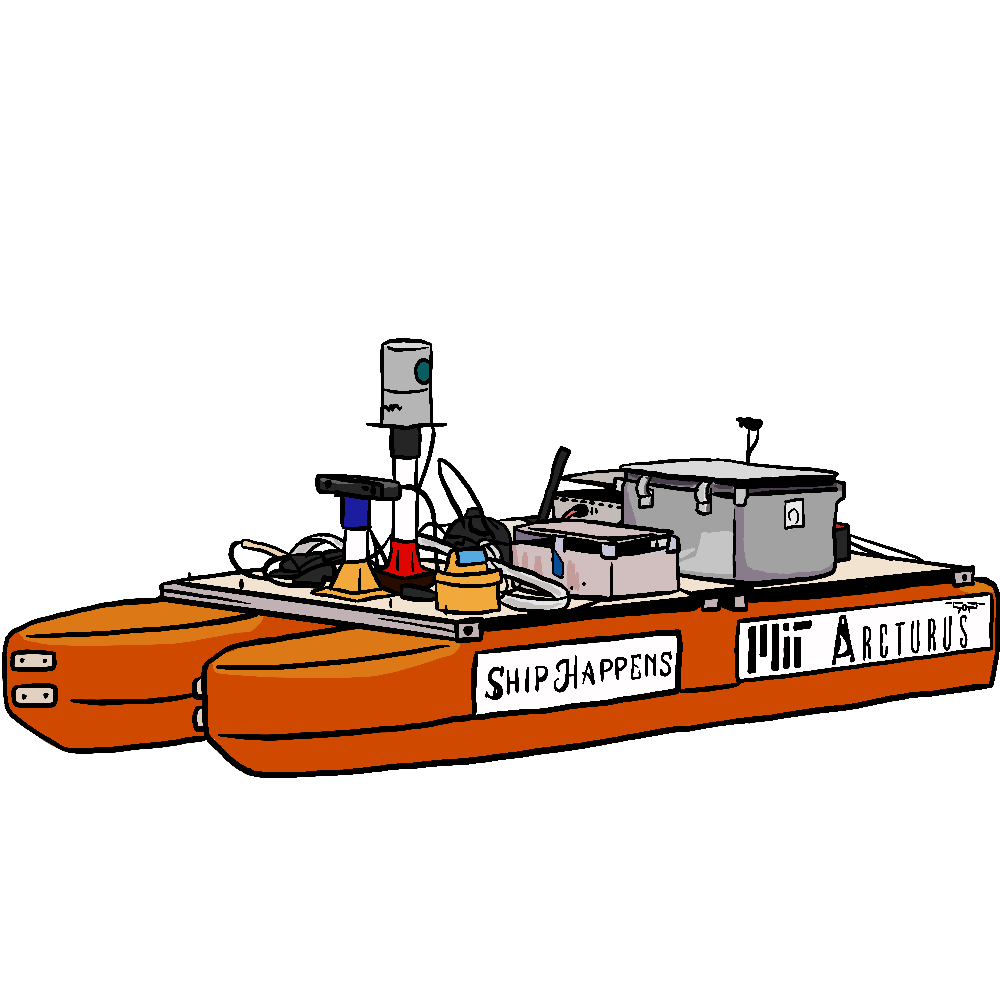
Starting off this new school year, our team focused heavily on recruitment and onboarding during the first few weeks of school because we want to ensure that everyone who has an interest in marine robotics has an opportunity to participate. We especially focused on developing useful training materials for each sub team, as experience level varies greatly from person to person. From participating in the Activities Midway to giving tours at the MIT Sea Grant lab, we successfully wrapped up recruiting with lots of new faces at our general meeting. The onboarding trainings for each sub team were also carefully divided to first develop some basic knowledge/skills before moving on to more Arcturus related topics. Now, each subteam is starting to dive into smaller projects to create our new flagship for the 2025 competition season.
MechE
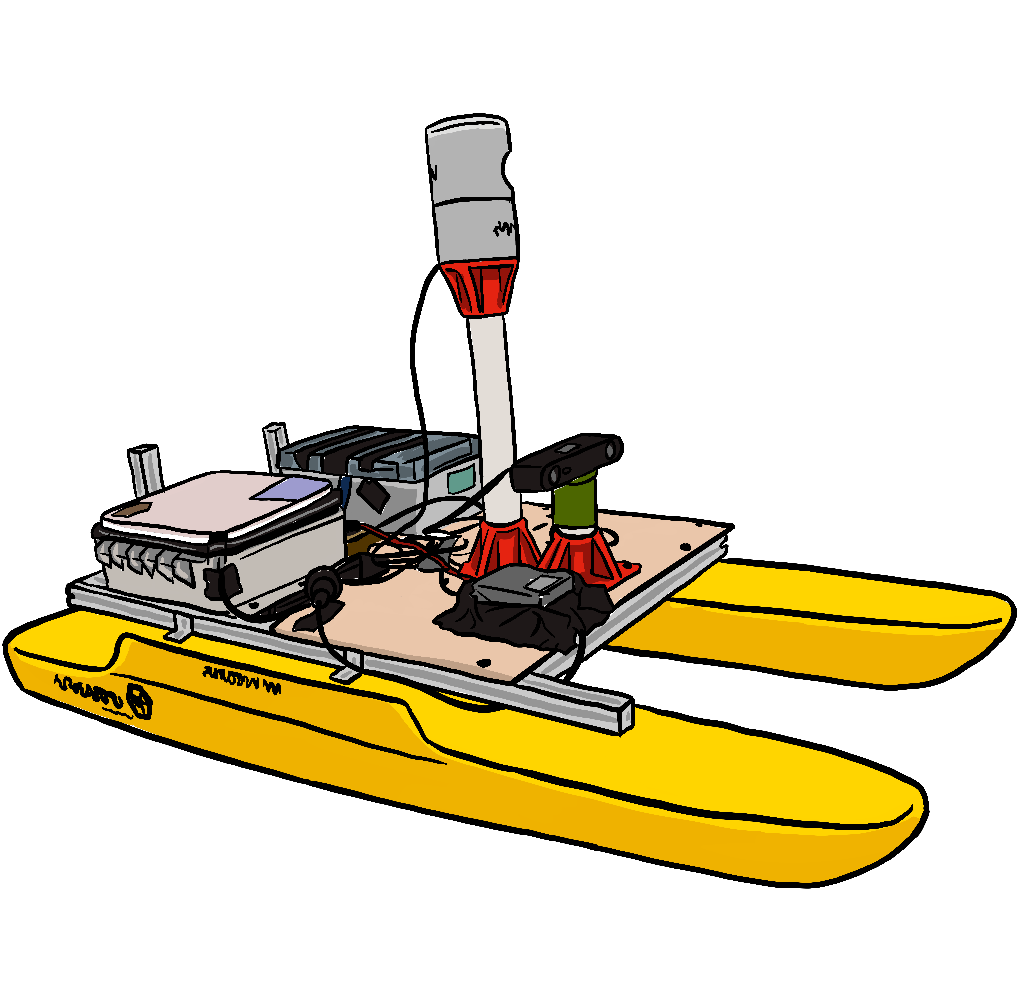
The MechE team began thinking about designs for the new competition boat. We started by considering our design parameters, and set the general dimensions of the boat that we want to make. Next, we designed the hulls using these dimensions, and thought of our general design parameters on the boat. The MechE team then split into groups working on different aspects of the boat, including groups for:
- Deck, who worked on the dimensions of the deck, its mounting methods to the boat, and placement of handles
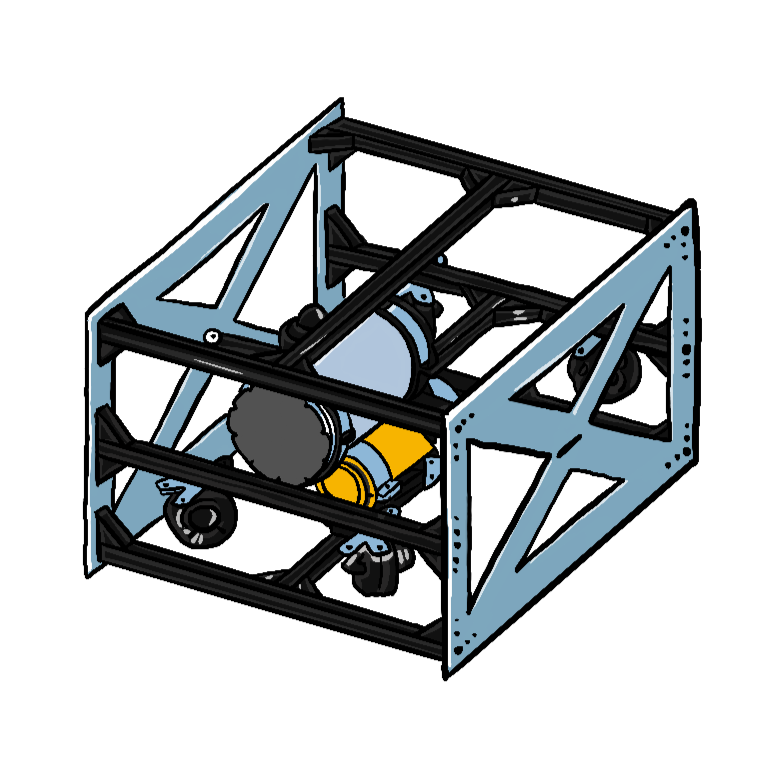
- Thrusters, who figured out methods of mounting the thrusters to the hulls and made cages so that the boat can be set down without interference from the thrusters
- Command Module, who designed the housing for some of the electronics as well as a method to get the LIDAR as high as possible for maximum vision capabilities
- Battery Box, who worked on the way that the batteries are set into and accessed from the hulls
In the coming weeks, we plan to continue with these designs and do both internal and external design reviews to refine them and ensure that it will work the way that we want it to.
EE
The EE team approached the new semester with a new vision of the standards we want to adhere to and the abilities we want our electronic systems to have. Secondly, for the term team came up with 8 subprojects EE will thoroughly develop:
- Thermal Management - our electronics box is already cool, but we need to make it cooler. Right now we are researching the most effective ways for thermal management and creating heat transfer simulations.
- Batteries and Battery Box - batteries must be protected at all costs, therefore we care about battery boxes.
- Power Distribution - we want our electronics box to be more organized and reliable, therefore we are developing a PCB which will take care of all power transformation and distribution to the specific elements in the box.
- BMS - our current BMS does its job, but we are looking for ways to integrate it more closely with the software stack we have and be able to read the battery charge percentages without using a 3rd party application.
- LED Signal Board - LEDs, LEDs, LEDs. EE wants to help implement faster in-water boat tests, and a strip of LEDs visible from the outside of the box signaling about the state of subsystems would be helpful for quicker deployments.
- The Box-like container - we are working with MechE to implement the next-gen box design.
- Remote E-Stop Board - EE is designing a PCB to replace the E-Stop protoboard.
- Led Tower Board - EE is designing a PCB to replace the Led Tower protoboard.
A group of 2-5 people work on each subproject, with a great share of those involved being new members of the team. In the coming weeks, we plan to continue working on the projects and introduce new members of the team to our development process.
Autonomy
As this is the beginning of a new season and there are fresh faces in the organization, the Autonomy subteam has spent the past few weeks in the onboarding phase. The main activity at every meeting has been making sure everyone has the proper software, processes, and permissions set up on their systems such as virtual machines and dual boots capable of running linux for ROS 2 as well as git accounts with access to the organization git repositories. Besides this, the autonomy lead Jacob has been educating the new recruits about the focus of the different sub teams within the autonomy group and how they interact with each other. In addition, he has explained the basics of the ROS 2 nodes and topics system, Github collaboration, Linux, MOOS, and how we use these software to efficiently create the programs vital to running the vehicle. Along the way, new members have been placed onto their preferred subteams and given introductory tasks to simulate what the rest of the year will look like as part of that group.